


A:新工科-智能+机械(电)工程教育综合创新平台
一、平台特点:

四、平台软件

完成实训前的注册,采用指纹登录形式,可有效杜绝学生请人代做实训的现象。

完成各种带传动的实训测试,系统提供自动和手动两种不同的实训方式以供不同需求的实训,手动实训方式:可供本科 及以下学生课程实训,系统自动记录实训中的相关数据,实训过程的控制则由实训人员通过软件界面逬行控制;自动方式: 则可用于硏究生完成各类带传动的实训测试,实训过程可通过实训参数配置模块迸行配置,系统将按预先配置进行自动的调 整实训的相关参数,实训数据也将自动记录和分析。
B:智能制造-工业机器人实训
一、工业机器人结构认知与拆装实训室
> > >工业机器人机械拆装实训站
常规六关节工业机器人是目前机器人行业市场应用***广的一种机器人结构形式,主要 区别于桌面型六轴、并联、水平机器人等。该款拆装机器人结构主要特征有:
1、 电机安装形式基本采用外露式,便于拆装的同时更能直观展现机器人整体结构;
2、 整机的6个关节均采用模组化设计,方便每个轴单独安装测试以及组装;
3、 取消了内置气管、电缆等标准机型配置;
4、 减速机与轴承的配合基本采用间隙配合,方便安装拆卸;
5、 该机型铸件均采用铝合金材料,安装时不需使用辅助设备,1-2人即可完成机器人的 组装。
> > >工业机器人电气拆装实训站
工业机器人电气拆装实训站主要用于学生对工业机器人控制系统的了解与学习,同时 锻炼学生的理解控制线路以及接线动手能力。该实训站主要有以下特点:
1、 采用直板开放式布局模式,方便学生的操作;
2、 采用直角双开门结构,保证系统在运行时安全的同时也极大避开了作业空间;
3、 系统与真实的电机相连,能检验系统的可行性;
4、 独立引岀3D仿真界面,使机器人系统与仿真系统中虚拟机器人相连,作为对控制系 统的检验手段;
5、 操作示教器式,虚拟机器人能直观的反应机器人的运行状态以及机器人动态姿势。
二、工业机器人基础综合应用实验室
> > >工业机器人多功能综合实训站 
本系统采用了模块化设计,每个功能模块相对独立, 用户可根据实验需求自由搭配和增减功能模块。所有功 能模块合理布局放置于实训台上,可以完成工业机器人 编程示教再现、视觉识别(形状、颜色、数字)、模拟焊 接、抛光打磨、装配,绘图、码垛、轨迹模拟、电机控 制,PLC编程、触摸屏界面设计、电气系统设计与接线、 机械装调、多种工具更换等实训功能,旨在培养的学生 的机器人编程能力和系统测试、操作维护能力,达到快 速提高职业技能,提高就业竞争力。
> > >工业机器人模块化基础实训站 
工业机器人模块化基础实训站主要用于学生对工业机 器人运用场景以及与不同场景配套情况的了解与学习, 同时锻炼学生的对不同场合的编程能力。该实训站可以 根据实训需要安排气爪搬运、吸盘搬运、码垛实训、轨 迹模拟、TCP点标定、焊接模拟、装配模拟、打磨模拟、 绘画书写、离线编程运用、机械装调、多种工具更换等 实训功能。
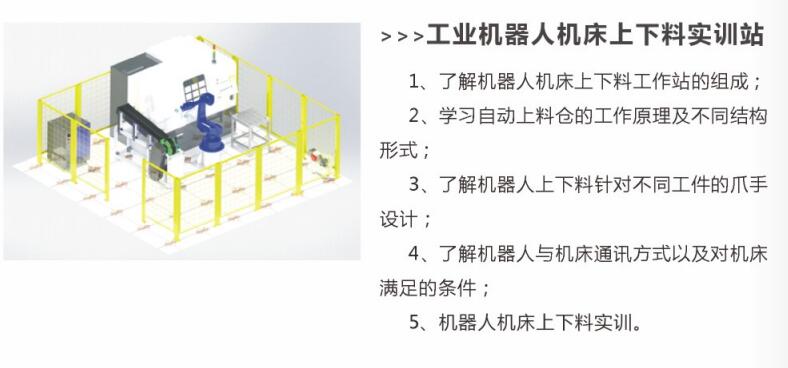
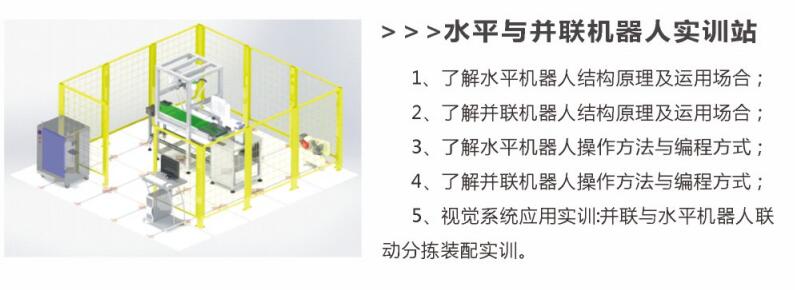
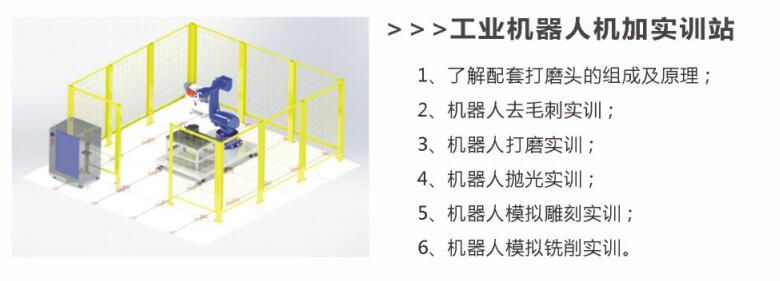
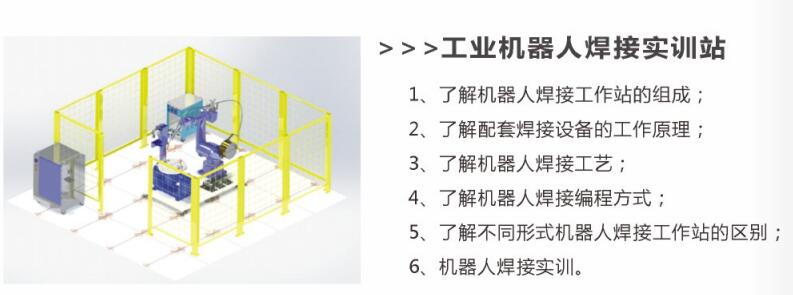
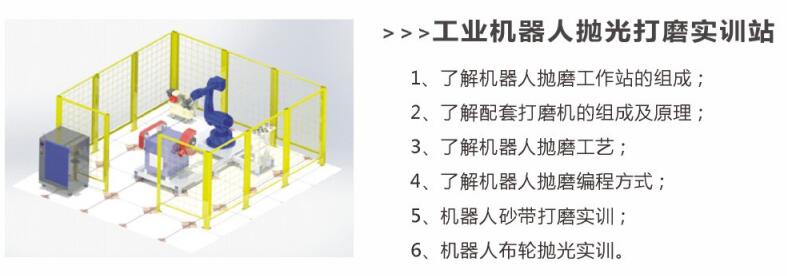
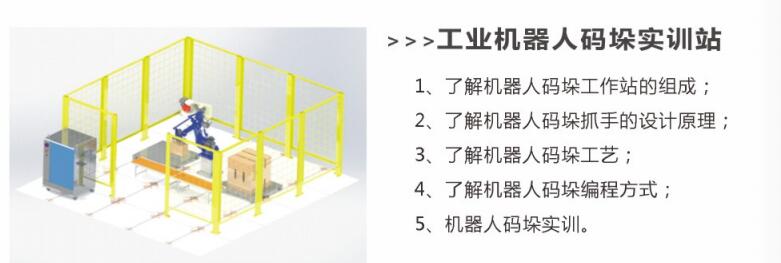
三、工业机器人单站应用实训室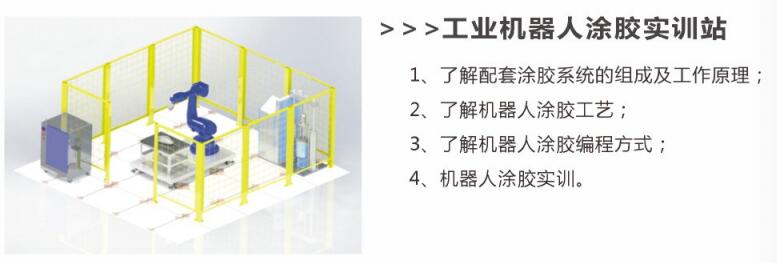
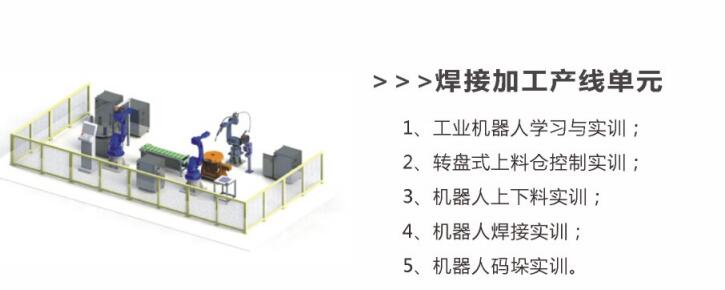
四、工业机器人综合产线应用实训室
五、离线编程仿真实训室


